Oliver – Hallowuino!!
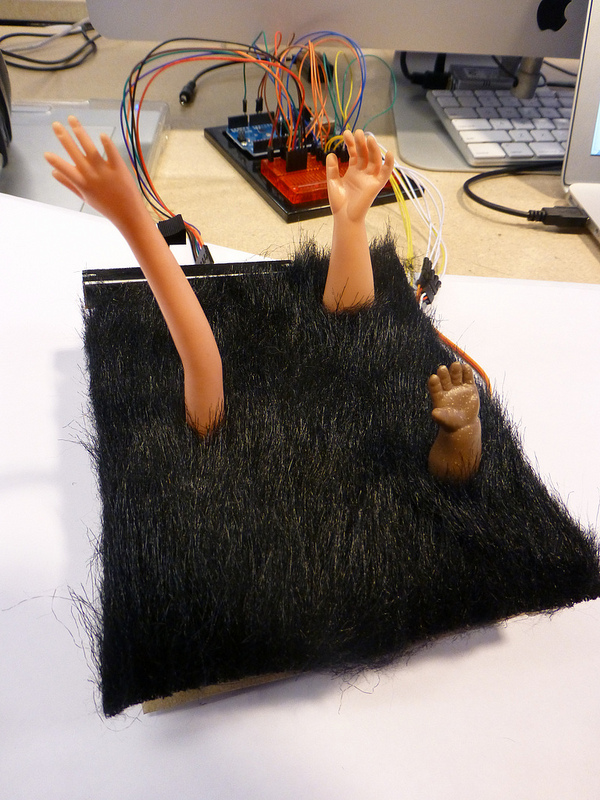
I decided to make a creepy doll arm “graveyard” where the ground is made of (fake) fur. Three plastic doll arms are connected to Servo motors, and they rotate at a speed controlled by a sliding potentiometer. If the potentiometer is at its lowest value, the arms twitch instead of rotating.
Photo:
Video:
[flickr video=8148299589 secret=8463568572 w=400 h=225]
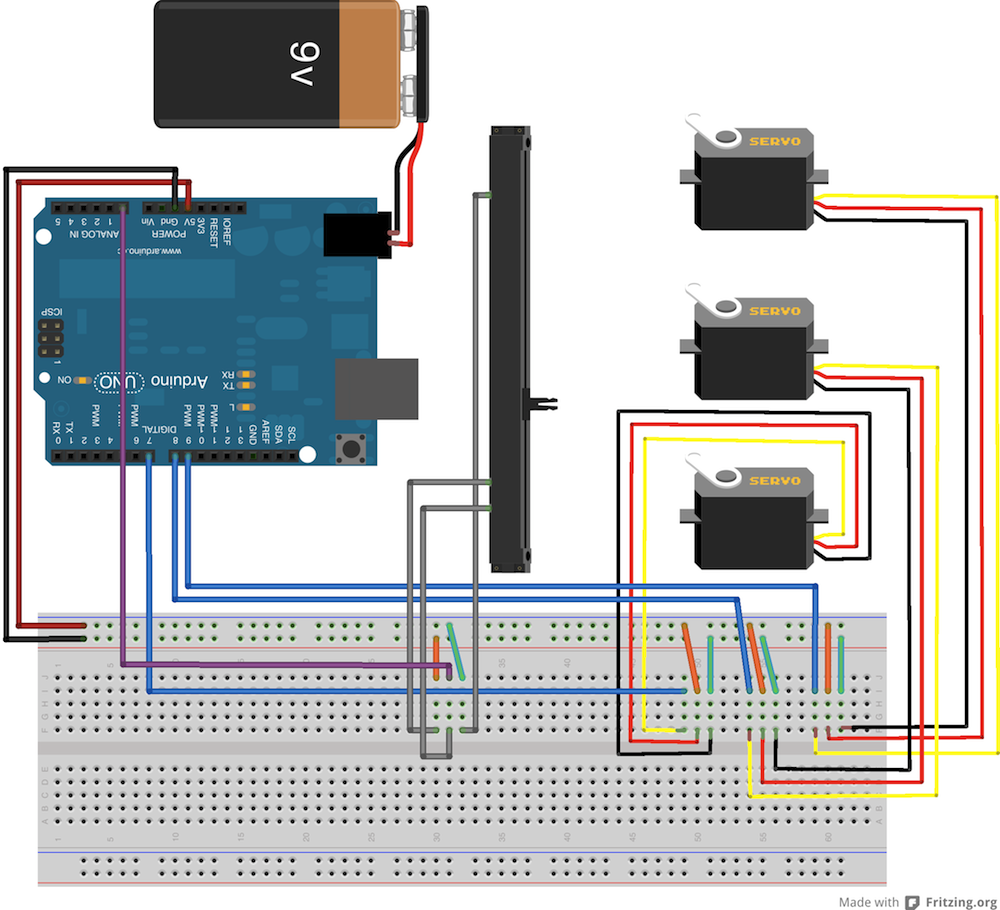
Fritzing diagram:
Code:
#include Servo.h
// WordPress will not allow the less than / greater than
// symbols that normally go around Servo.h
Servo servo1, servo2, servo3;
const int sensorPin = 0;
int sensorValue, delayTime, position;
void setup() {
// servos are connected to pins 7, 8 and 9
servo1.attach(9);
servo2.attach(8);
servo3.attach(7);
Serial.begin(9600);
}
void loop() {
sensorValue = analogRead(sensorPin);
Serial.println (sensorValue);
moveServos();
}
void moveServos() {
// rotate to 180 degrees
for(position = 0; position = 0; position -= sensorValue) {
changePositions();
}
}
void changePositions() {
// test for the sensor value as servo rotates to see if it should
// change speed
sensorValue = analogRead(sensorPin);
// map potentiometer values to speeds 1-7
sensorValue = map(sensorValue, 0,900, 1,7);
servo1.write(position);
servo2.write(position);
servo3.write(position);
// test for delay time as servo rotates to see if it should
// switch to twitching
delayTime = testDelayTime();
delay(delayTime);
}
int testDelayTime() {
// if the potentiometer value is less than 2, switch to the
// twitching motion by setting delay time to zero
if (sensorValue < 2) {
delayTime = 0;
}
else {
delayTime = 20;
}
return delayTime;
}