Luo Yi Tan – Hallowuino
I made a horrifying ghoul for halloween, using a box, leds, servos, ping pong balls, vampire teeth and an arduino.
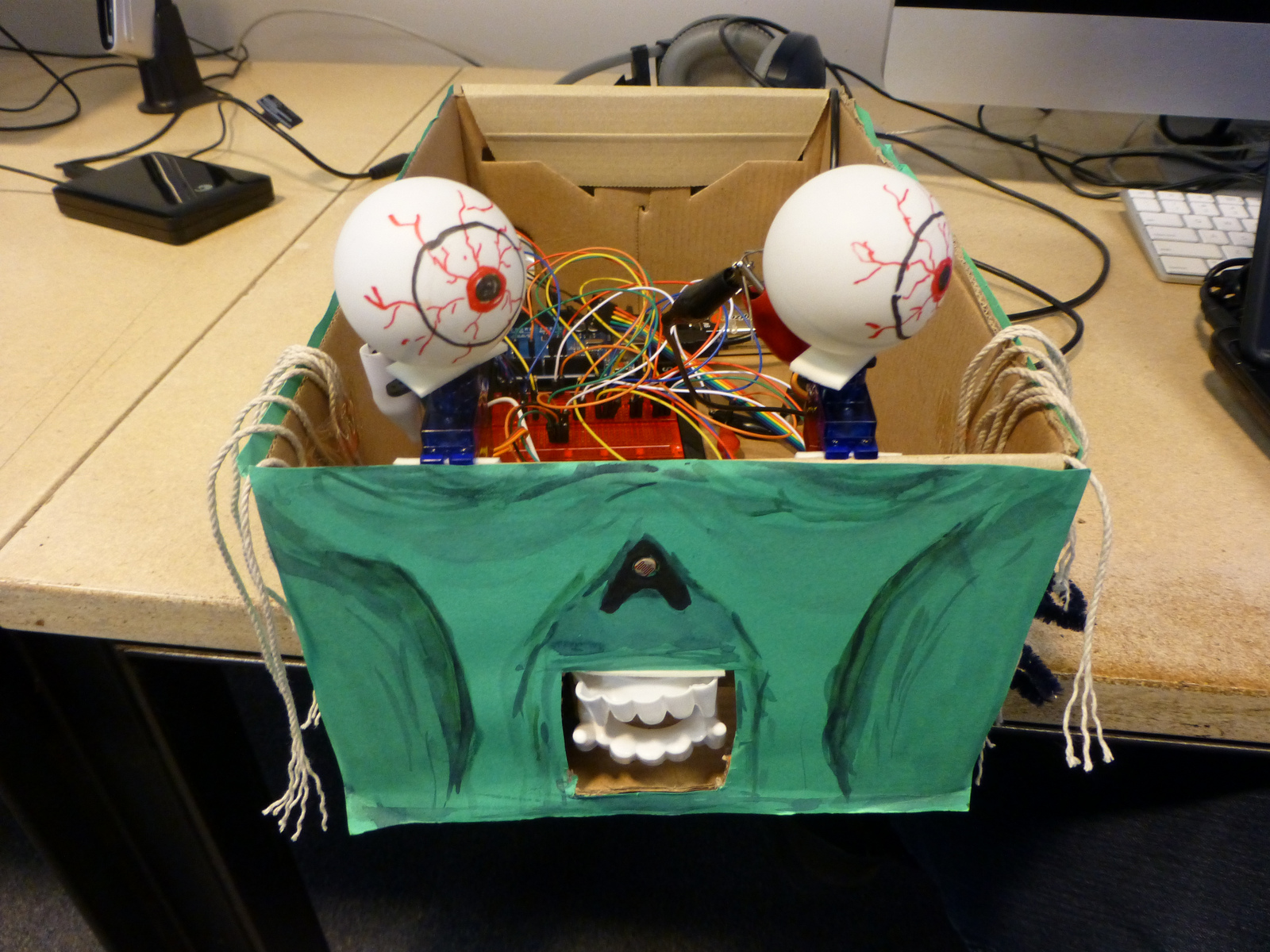
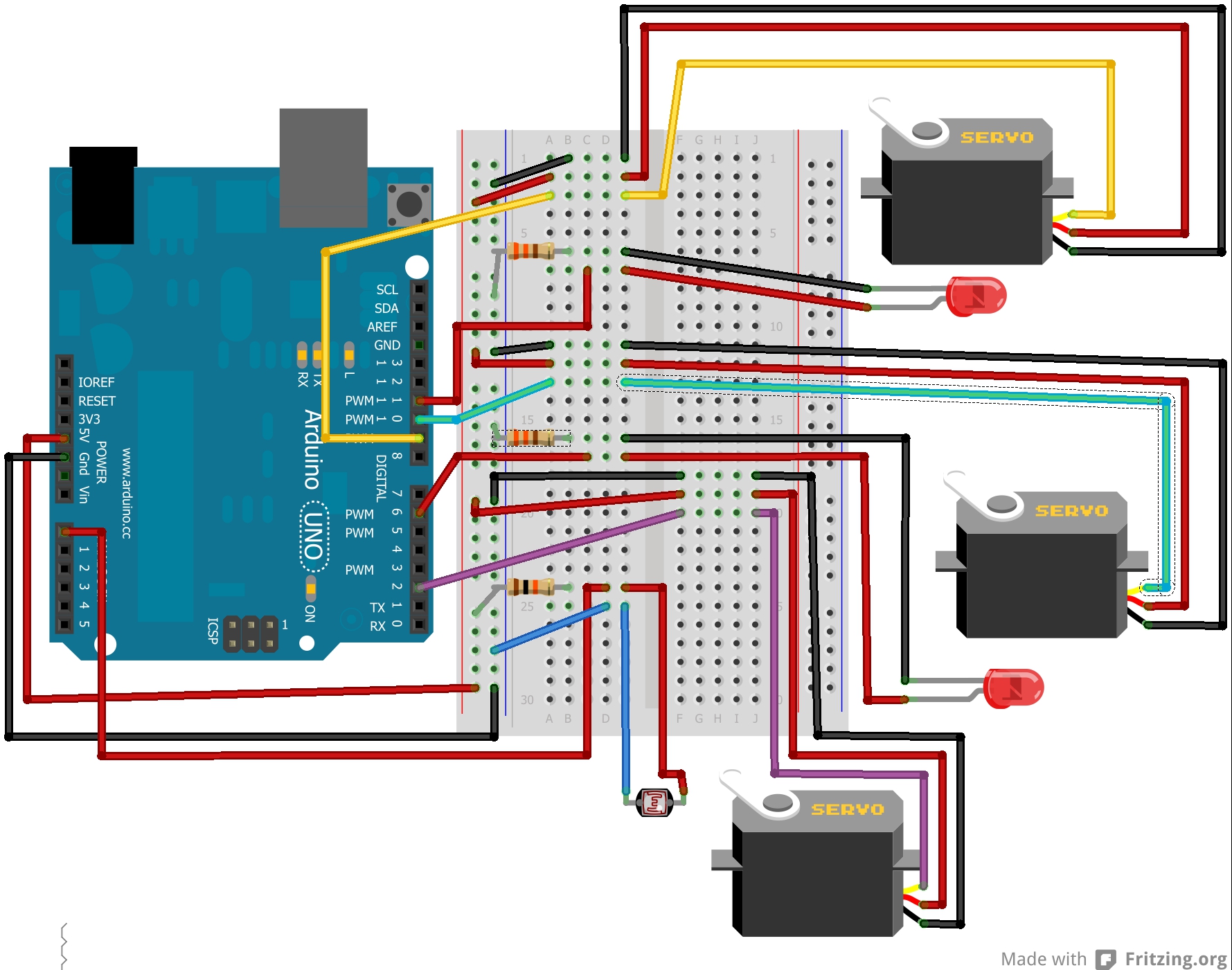
There is a photoresistor in its nose, which detects the amount of light in the environment. When the lights are off, the servos twitch at random angles to move the eyes and mouth. I used the autotune function from the circuit 6 in the SIK book so I didn’t have to calibrate it in different lighting environments.
Video of it in action:
[flickr video=8148307250 secret=351dfe9dff w=400 h=225]
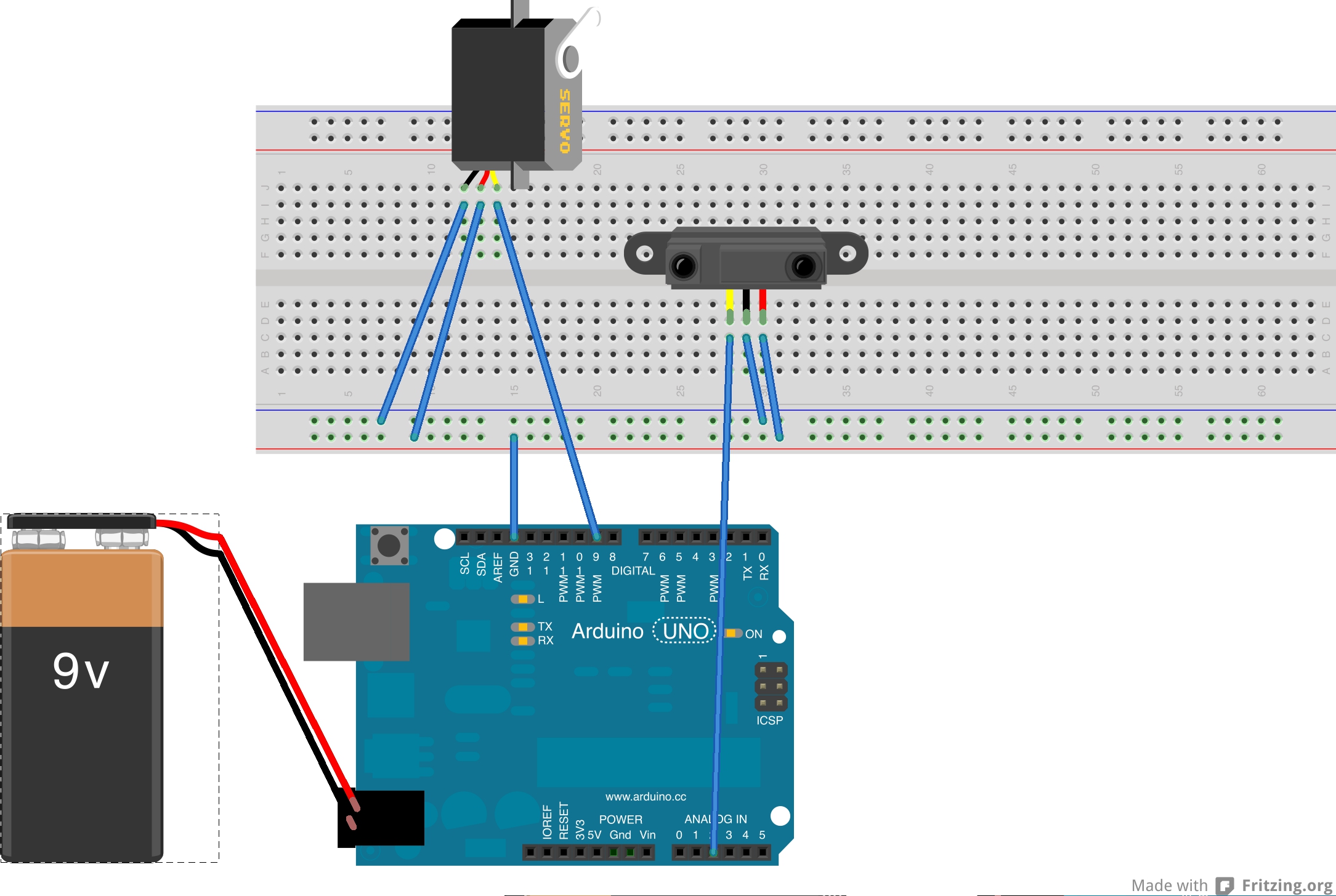
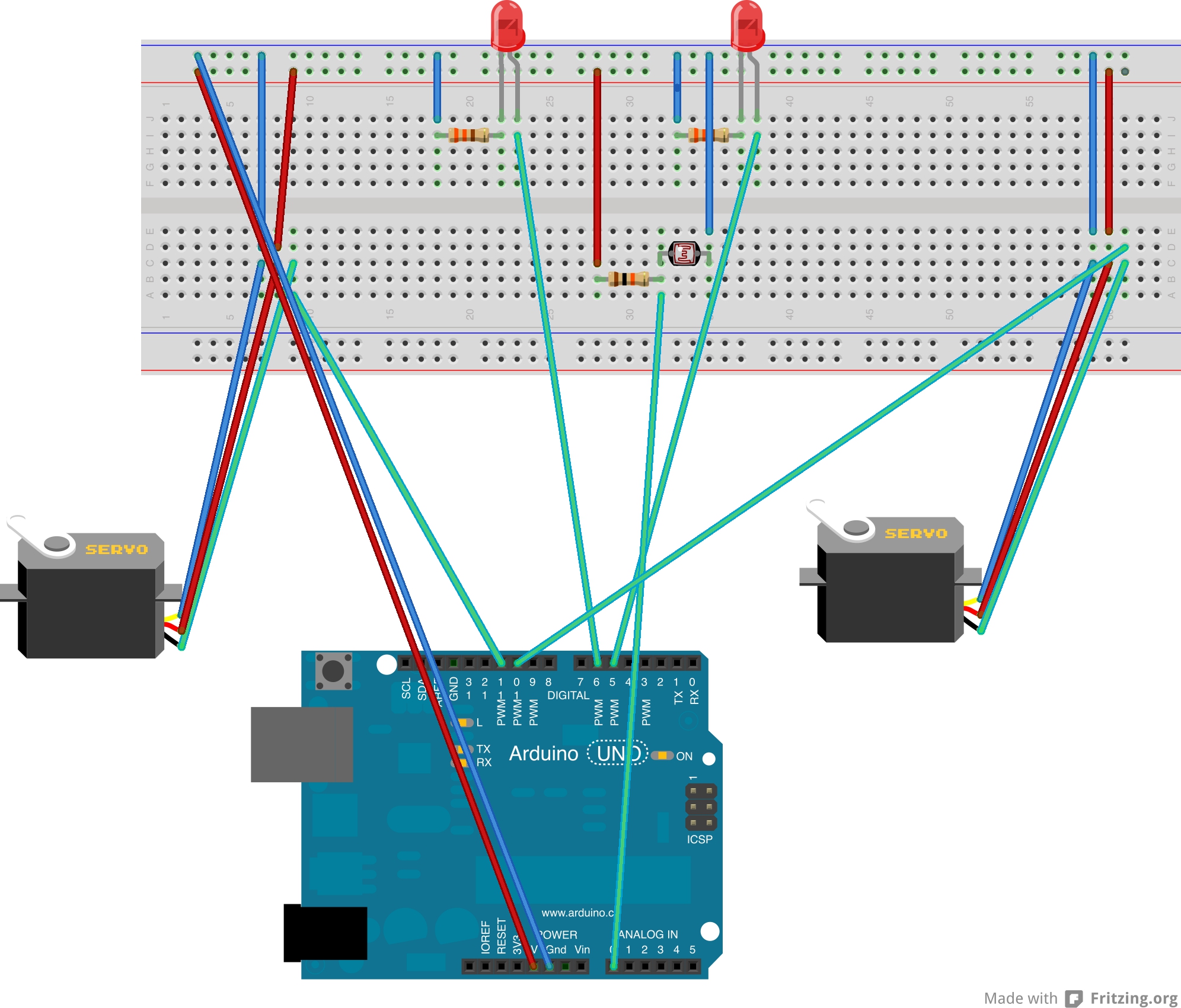
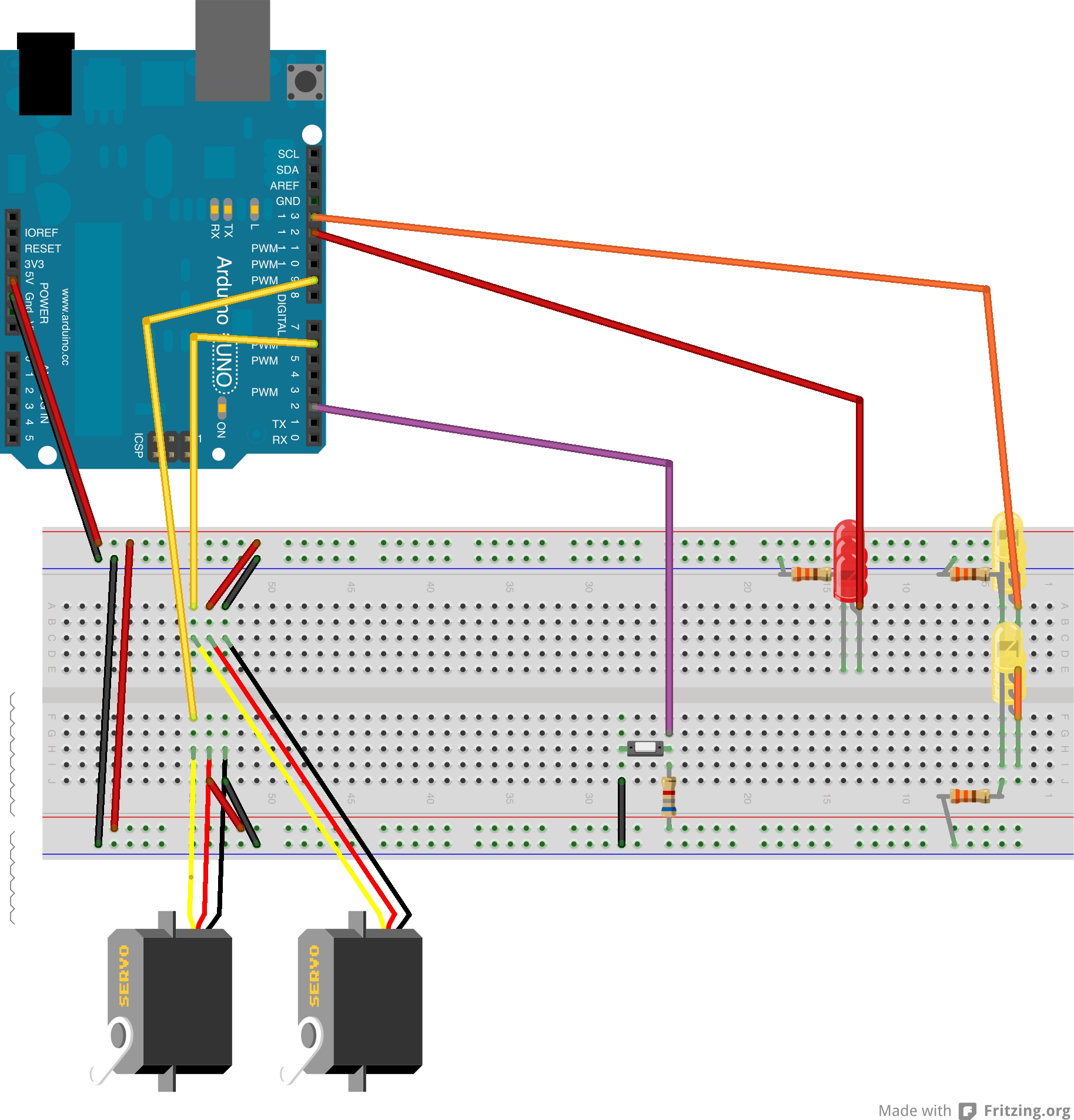
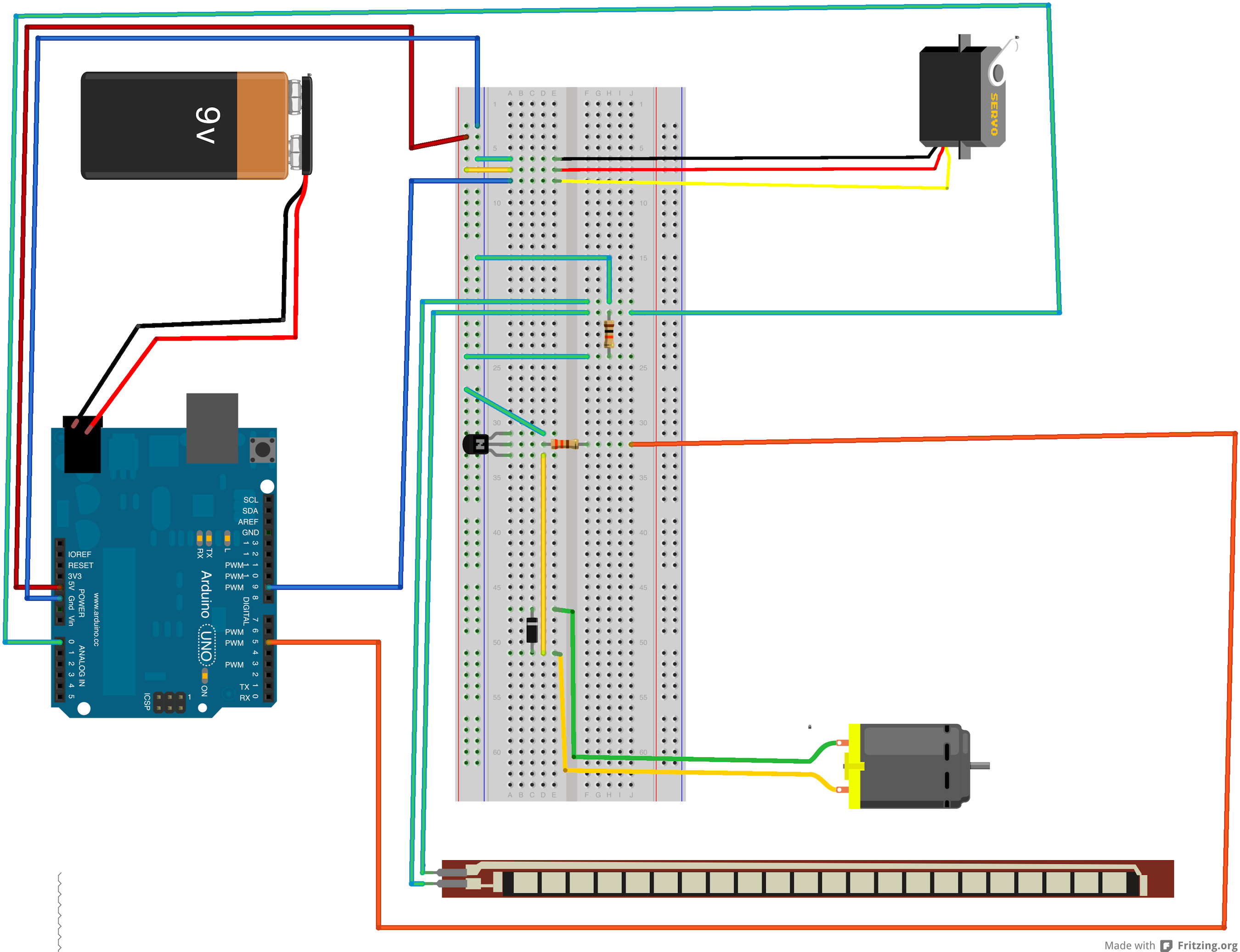
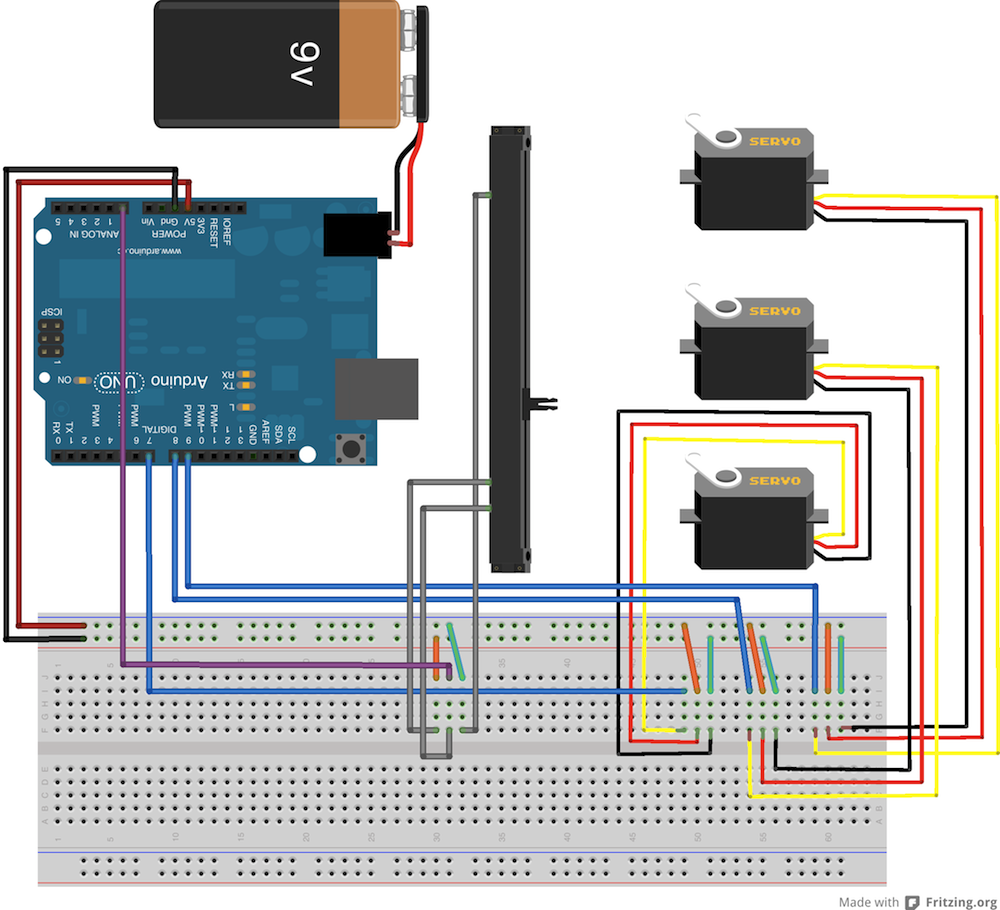
Here’s a diagram of my circuit:
and my code:
#include
Servo servo1, servo2, servo3; // servo control object
int pos1 = 0;
int pos2 = 0;
int led1 = 11;
int led2 = 6;
int input = 3;
int period = 500;
int sensorVal = 0;
unsigned long lastDidItTime = 0;
int high = 0, low = 1023;
void setup()
{
pinMode(led1, OUTPUT);
pinMode(led2, OUTPUT);
pinMode(input, INPUT);
servo1.attach(9);
servo2.attach(10);
servo3.attach(3);
Serial.begin(9600);
}
void loop() {
sensorVal = analogRead(A0);
autoTune();
unsigned long presentTime = millis();
Serial.println(sensorVal);
if(sensorVal > 0){
unsigned long elapsedAmount = presentTime - lastDidItTime;
if (elapsedAmount > period){
pos1 = random (50, 140);
pos2 = random (30, 70);
servo1.attach(9);
servo2.attach(10);
servo1.write(pos1);
servo2.write(pos1);
digitalWrite(led1, HIGH);
digitalWrite(led2, HIGH);
lastDidItTime = presentTime;
servo3.write(pos2);
}
}
else {
servo1.write(90);
servo2.write(90);
servo3.write(90);
digitalWrite(led1, LOW);
digitalWrite(led2, LOW);
}
}
void autoTune()
{
if (sensorVal < low) { low = sensorVal; } if (sensorVal > high)
{
high = sensorVal;
}
sensorVal = map(sensorVal, low+30, high-30, 0, 255);
sensorVal = constrain(sensorVal, 0, 255);
}