Josh Lopez-Binder, Assignment 09
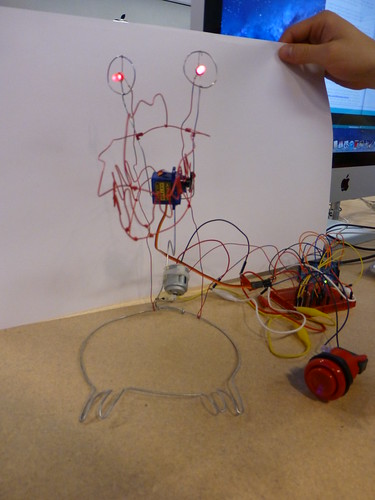
A little wire monster with a movable jaw, eyes that blink in various ways, and a motor with an off-center weight that causes the monster to shake.
[flickr video=8148332532 secret=95662d48bb w=400 h=225]

#include <Servo.h>
Servo servo1;
int numLeds = 2;
int ledPins[2] = {
13,12};
int sensorPin = A0;
int motorPin = 2;
int elapsed = 0;
int startMilli = 0;
int timeBlink = 100; //millis
boolean eyesAreOn =false;
boolean buttonWasPressed = false;
void setup(){
Serial.begin(9600);
for(int i = 0; i < numLeds; i++){
pinMode(ledPins[i], OUTPUT);
}
pinMode(motorPin, OUTPUT);
//pinMode(sensorPin, INPUT);
servo1.attach(9);
}
void loop(){
int sensorVal = analogRead(sensorPin);
Serial.println(sensorVal);
if(sensorVal <10){
rawr();
}
}
void rawr(){
startMilli = millis();
for(int angle = 0; angle= timeBlink){
startMilli = millis();
for(int i = 0; i< numLeds; i++){
if(eyesAreOn){
digitalWrite(ledPins[i], LOW);
}
else {
digitalWrite(ledPins[i], HIGH);
}
}
eyesAreOn = !eyesAreOn;
}
servo1.write(angle);
delay(20);
for(int i = 0; i< numLeds; i++){
digitalWrite(ledPins[i], LOW);
}
}
digitalWrite(motorPin, HIGH);
//freak out eyes, freak out motor
for(int i = 0; i<45; i++){
int ledRand1 = random(0,100);
int ledRand2 = random(0,100);
if(ledRand1<=50){
digitalWrite(ledPins[0], HIGH);
} else{
digitalWrite(ledPins[0],LOW);
}
if(ledRand2 <=50){
digitalWrite(ledPins[1],HIGH);
} else{
digitalWrite(ledPins[1],LOW);
}
delay(70);
}
digitalWrite(motorPin, LOW);
servo1.write(10);
}