VarvaraToulkeridou-Generate with Braitenberg Vehicles
The objective of this project is form generation via a Braitenberg vehicles simulation.
A Braitenberg vehicle is a concept developed by the neuroanatomist Valentino Braitenberg in his book “Vehicles, Experiments in Synthetic Psychology” (full reference: Braitenberg, Valentino. Vehicles, Experiments in Synthetic Psychology. MIT Press, Boston. 1984). Braitenberg’s objective was to illustrate that intelligent behavior can emerge from simple sensorimotor interaction between an agent and its environment without representation of the environment or any kind of inference.
What excites me about this concept is how simple behaviors on the micro-level can result to the emergence of more complex behaviors on the macro-level.
—————————————————————————————————————————————
Reas, Tissue Software, 2002




—————————————————————————————————————————————
There have been attempts in the field of dance performances to bring together explicitly movement with geometry. Two examples are described below:
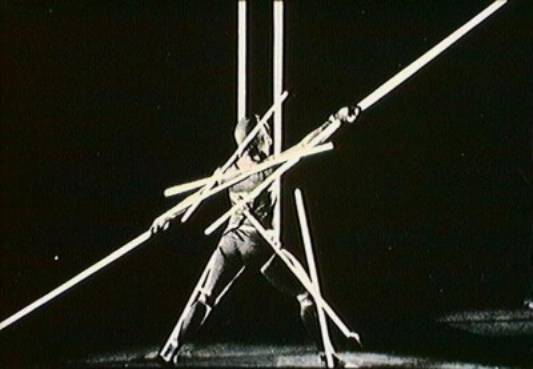
Slat Dance, Oscar Schlemmer, Bauhaus, 1926
William Forsythe, imagines virtual lines and shapes in space that could be bent, tossed, or distorted. By moving from a point to a line to a plane to a volume, geometric space can be visualized as composed of points that were vastly interconnected. These points are all contained within the dancer’s body; an infinite number of movements and positions are produced by a series of “foldings” and “unfoldings”. Dancers can perceive relationships between any of the points on the curves and any other parts of their bodies. What makes it into a performance is the dancer illustrating the presence of these imagined relationships by moving.
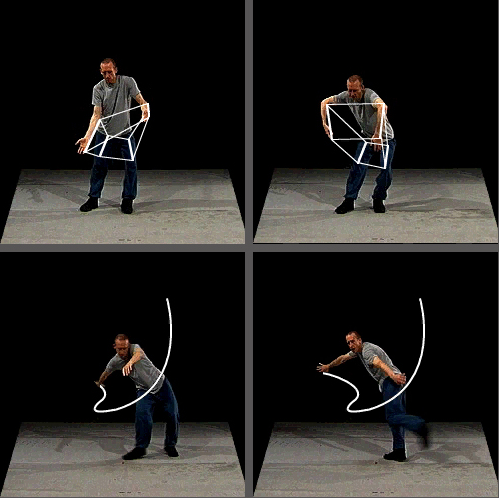
Improvisation Technologies – Dance Geometry, OpenEnded Group, 1999
>> The computational tool
A Braitenberg vehicle is an agent that can autonomously move around. It has primitive sensors reacting to a predefined stimulus and wheels (each driven by its own motor) that function as actuators. In its simplest form, the sensor is directly connected to an effector, so that a sensed signal immediately produces a movement of the wheel. Depending on how sensors and wheels are connected, the vehicle exhibits different behaviors.

In the diagram below we can observe some of the resulting behaviors according to how the sensors and actuators are connected.

source: http://www.it.bton.ac.uk/Research/CIG/Believable%20Agents/
>> the environment
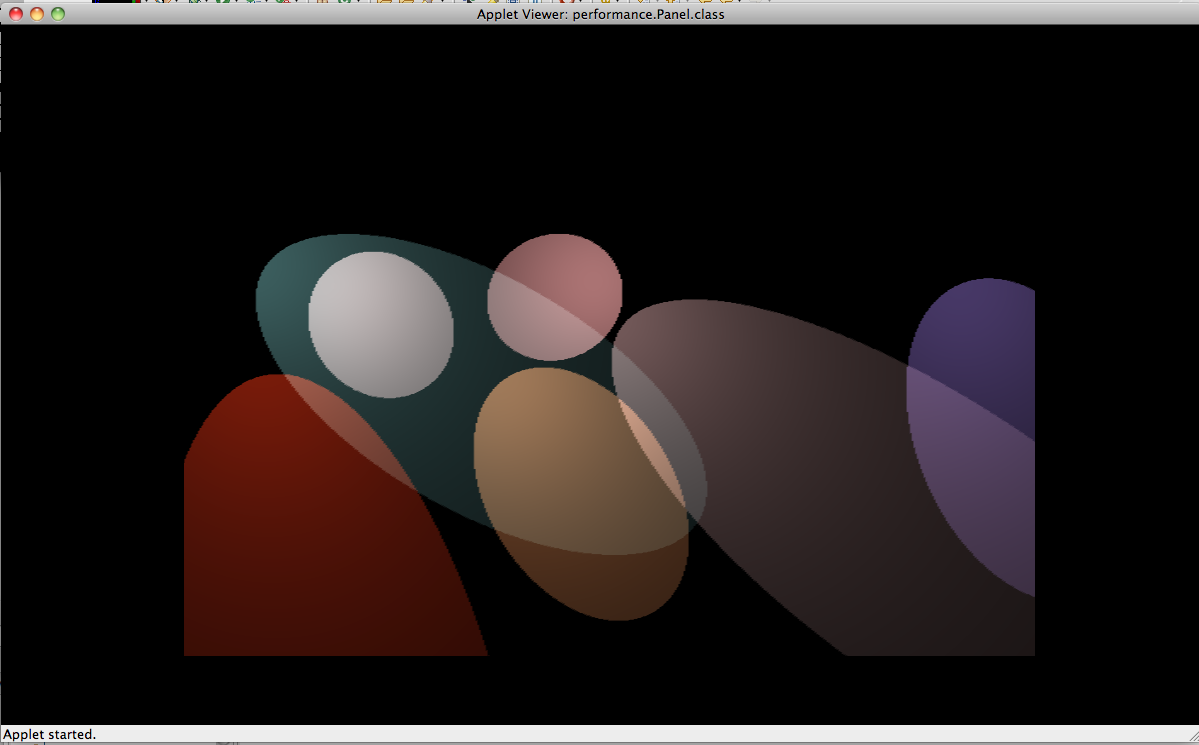
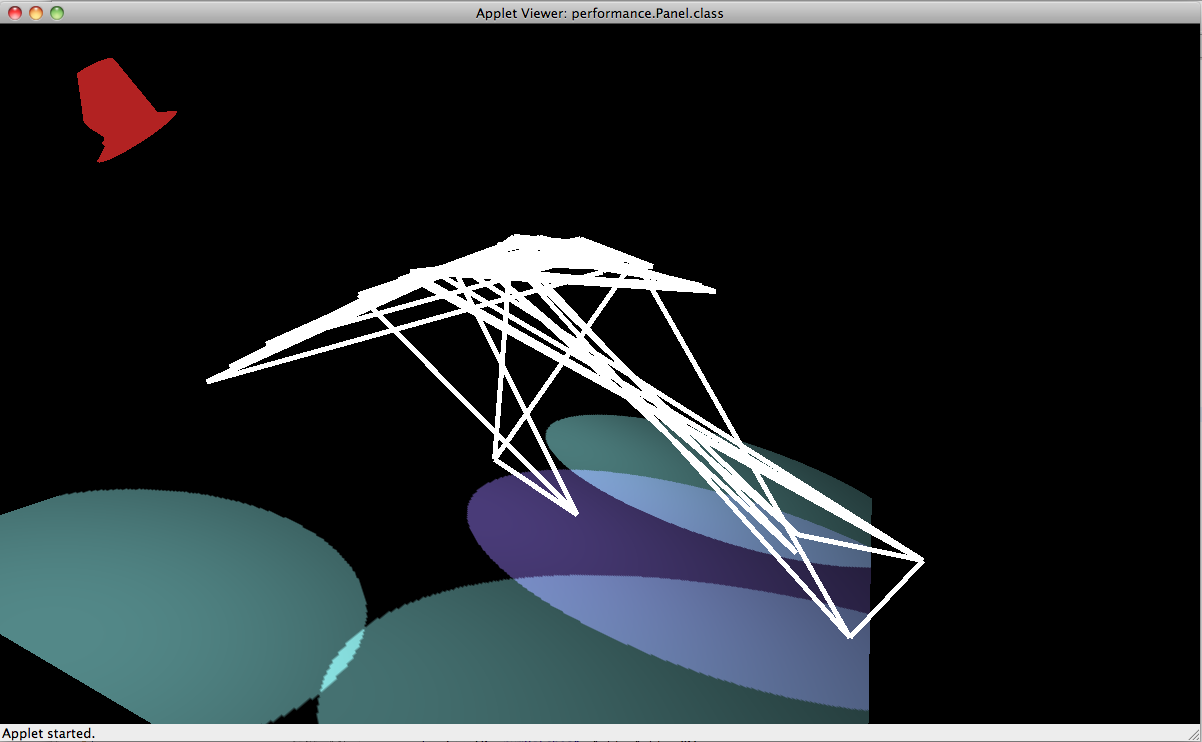
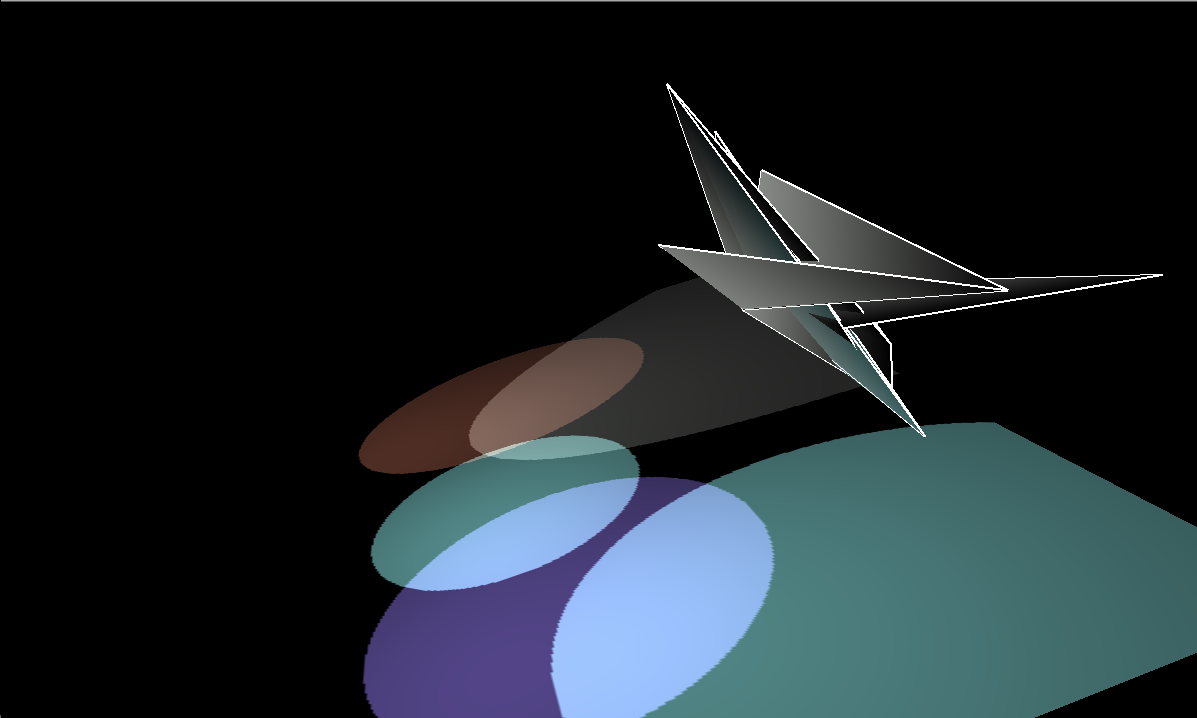
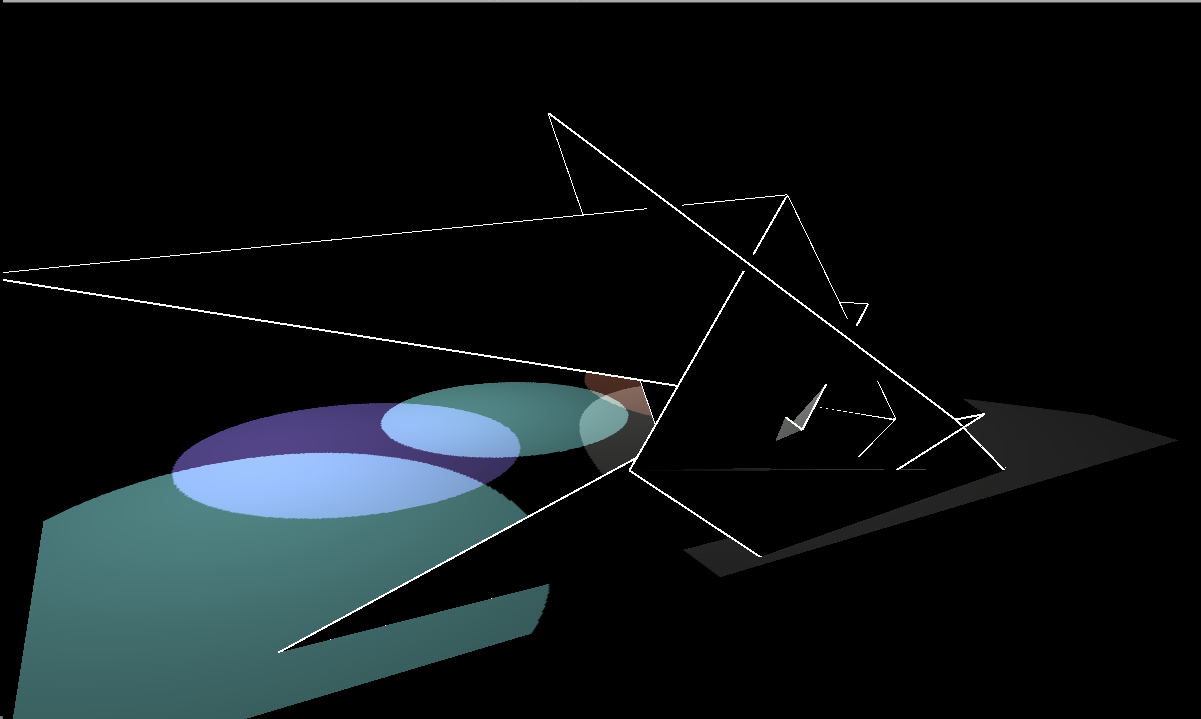
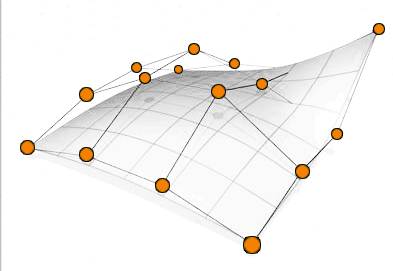
In the current project the environment selected to provide stimuli for the vehicles is a 3d stage where a number of spotlights are placed interactively by the user. The light patterns and colors can vary to actuate varying behaviors.
The vehicles can move in 3d space reacting to the light stimuli. The vehicles will be regarded as constituting the vertices of lines or the control points of surfaces which are going to get transformed and distorted over time. The intention is to constraint the freedom of movement of the vehicles by placing springs at selected points. The libraries of Toxiclibs, Verlet Physics and Peasycam are being used.