John Choi – Ambassador Robot 001, Halley
Ever since I set foot at Carnegie Mellon, I’ve been playing around with the idea of building a mid-large humanoid robot, just for kicks. Well, not actually just for kicks, but mostly because I thought the idea of building one was simply flatout awesome. So I began by learning all the hardware basics (Wiring, Soldering, Perfboards, 3D Printing and so forth) at the CMU Robotics Club during my freshman year. During the Winter Break of my freshman year, I prototyped a concept of a singing robot head that uses an Android phone as a virtual face display system. This worked out great, and I knew I wanted to implement the same phone-face for the large expressive humanoid robot I was thinking of building. Then comes Summer Break, which is where I truly began fleshing out my concept for building this robot. The entire CAD model was created using Rhinoceros. When the semester for Fall 2014 began, I applied for an FRFAF Grant so I would be able to turn my concept in to reality, and thankfully, the STUDIO accepted my request and awarded me precisely $500 to do just that. I wasted no time and proceeded to get all the necessary parts laser cut from black, white and clear cast acrylic (looking back, I’m thinking I probably should have used ABS instead due to acrylic being relatively easy to shatter). Over the course of the semester, I assembled the robot, beginning with the head, then the legs, then the arms, and finally the torso and backpack. This took a VERY long time. Even though I spent every scrap of free time I had on this project, coursework nevertheless got the better of me and slowed down assembly. Barely over Thanksgiving Break, I finished assembly, along with all the necessary electronics. No code yet, except for some very rudimentary testing of the servo motion (see video below). Ultimately, I see this project as a platform for a greater range of humanoid mechatronic animation. The first use: turn Halley into a robotic student capable of interacting with professors in class.
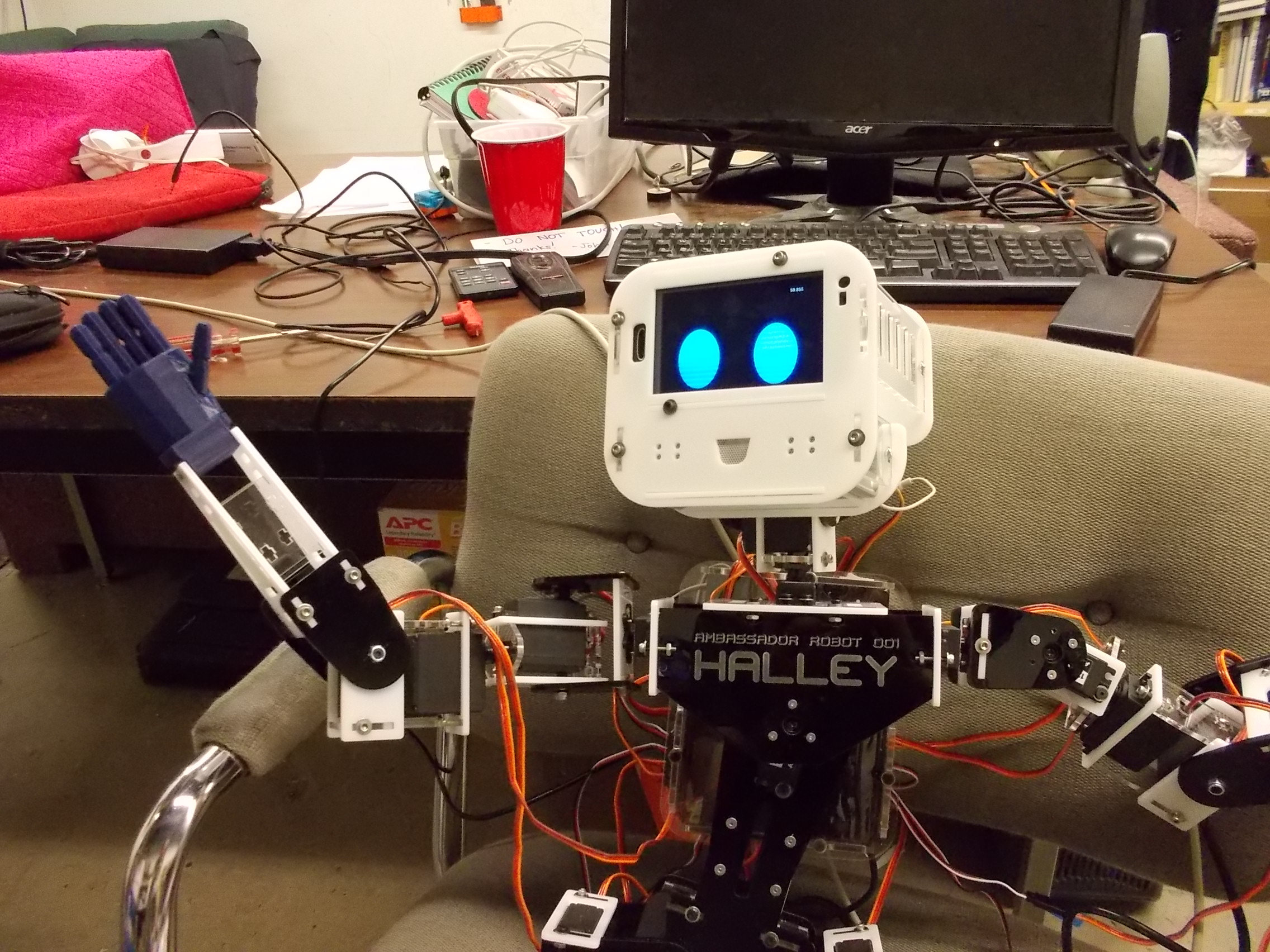
Above: Just testing some of the servos. Nothing too interesting, yet.
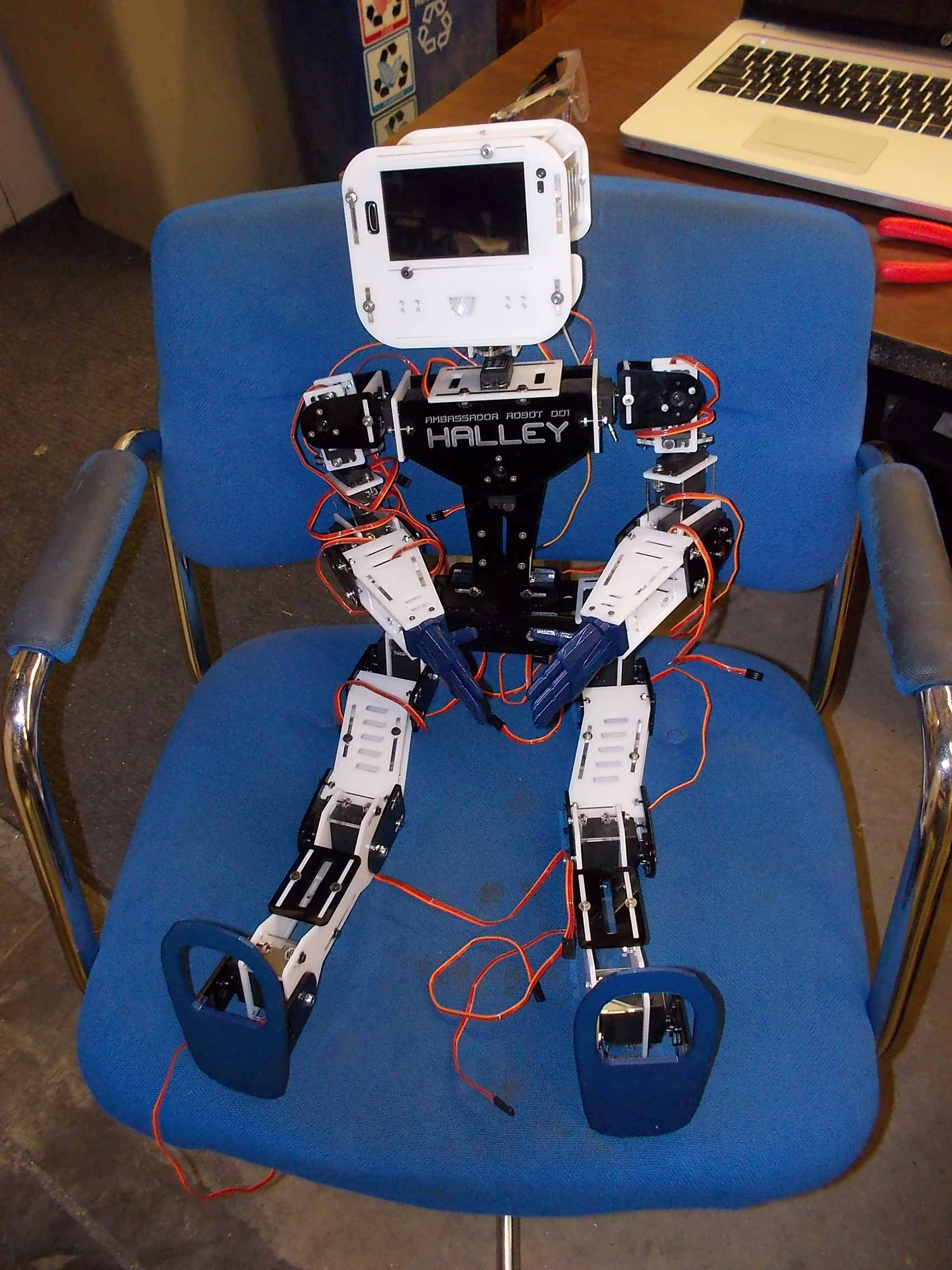
Below: Just a clean photograph of the robot sleeping.

Above: Just an initial concept sketch.
Below: A render of the CAD model using Rhinoceros.

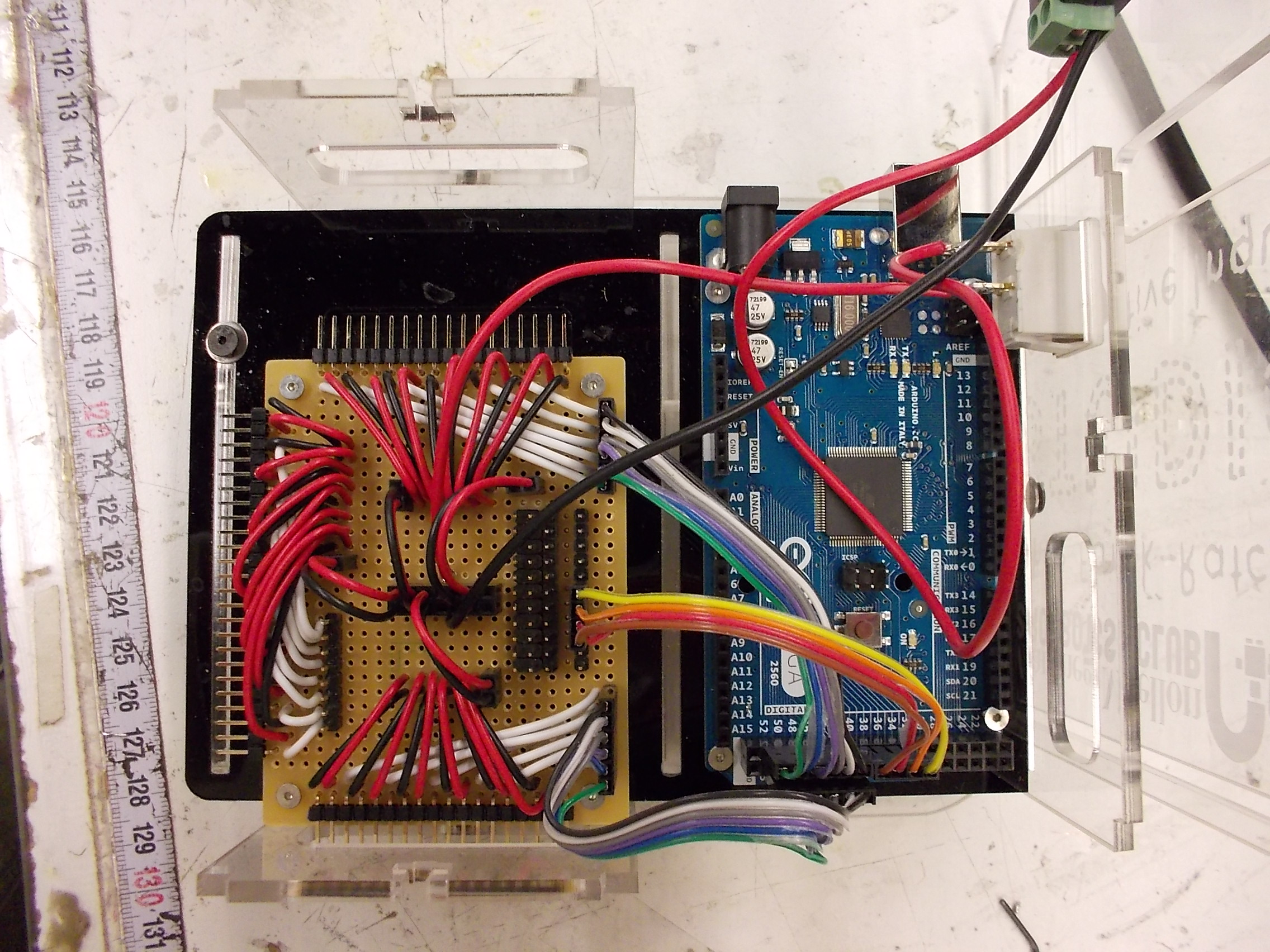
Above: A photograph showing the wiring. Careful wire planning prevented the whole thing from becoming a giant rat’s nest.
Below: A Fritzing diagram showing the wiring. Its actually simpler than it looks, as it really is nothing more than 21 servos hooked up through a perfboard to an Arduino Mega.
