Overview
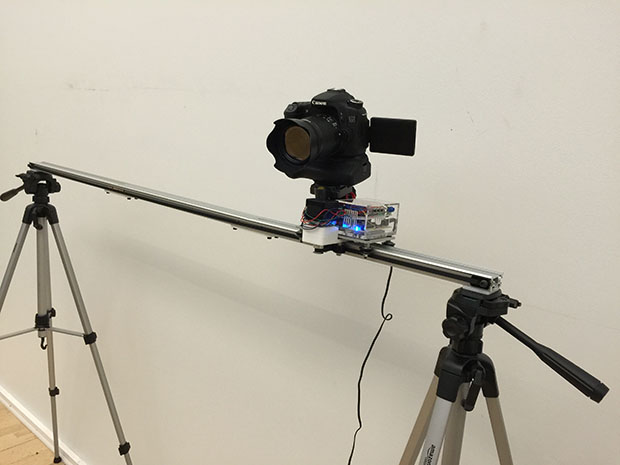
This project is an open source and accessible hardware platform for advanced cinematics. These technologies for camera movement are complicated and expensive, but this arrangement will give the same level of dynamic capability to anyone with a laptop and a DSLR Camera.
Project Update
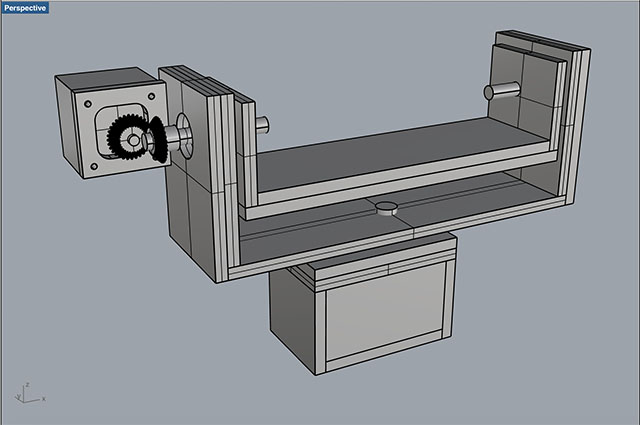
+Hardware is currently being fabricated.
+Software Framework has been established.
+All critical hardware has been sourced.

Current Challenges
+Material Rigidity at low cost
(Since the desired end product is good video, any major vibration transference or lack of rigidity is not acceptable)
+Solutions Include Wood or High Density Plastics
(Metal is time / resource / financially consuming)
Remaining Tasks
+Solve Key Software Math (Coordinate Translation)
+Finalize Hardware (Refine / Polish)
Timeline Adherence / Revision
+Tue April 14th – Functioning Hardware prototype with Arduino control
*All hardware specific timing bugs are worked out
+Tue April 21st – Hacked together prototype with Kinect coordinates
*Major math has been solved. The rest of the time is for refined use cases
+Tue April 28th – Refined project
3 Questions
What projects do you know of that use Kinect for real time mechanical tracking?
Any opinions of the best hardware to use for a macbook to motor connection?
What features do you see this having from a use case scenario?