A two-way robotic avatar communication system. Skype controlled animatronic heads (chatbots).
The chatbots work by “gluing” together several software applications to communicate with and actuate the hardware animatronic heads. The application pipeline looks like this.
Skype > Pixel grabber > FaceOSC (OF) > Oscuino (OF) > Serial > Arduino > Servos
Creating the bots began with designing their hardware and mechanisms for movement. This was also the most difficult and time consuming part of the process.

I spent most of my time iterating new mechanisms and face designs. (it was a lot of fun though). My original plan included much more complicated movements.
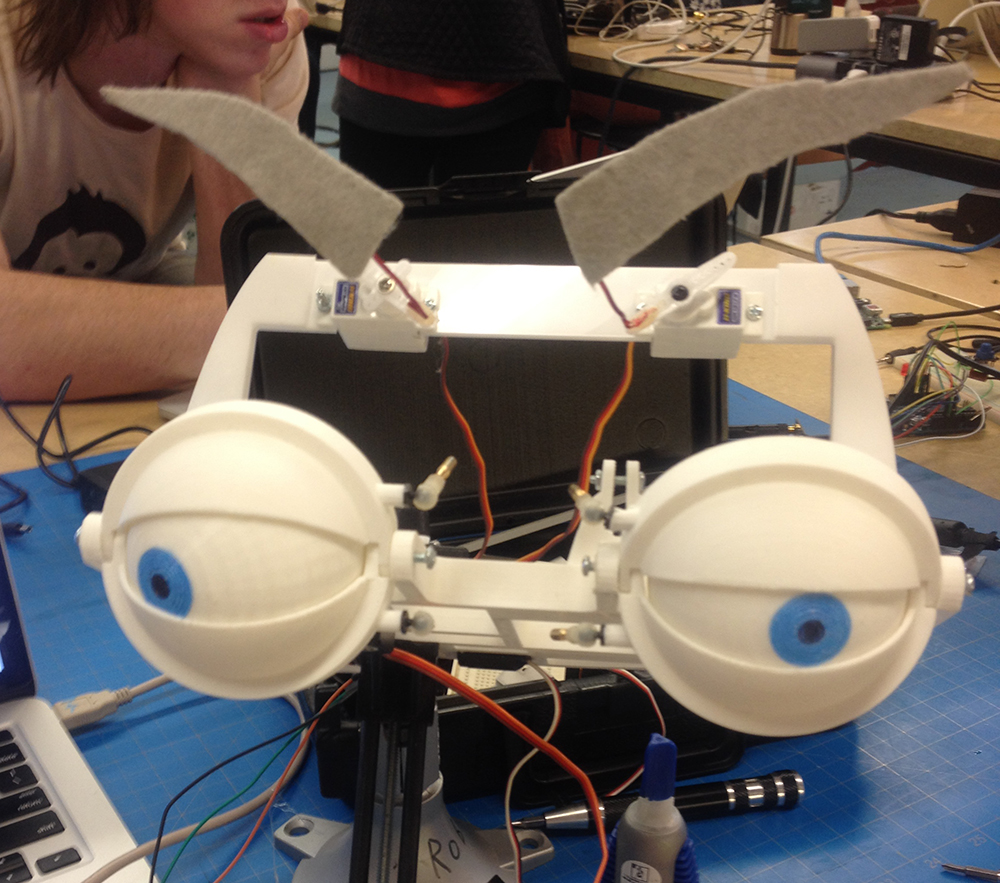
However, I eventually realized animatronics are very hard and should be approached with baby steps first. So I scaled back my design to only include eyebrow and mouth movements. This helped limit the number of servos I needed to drive also.
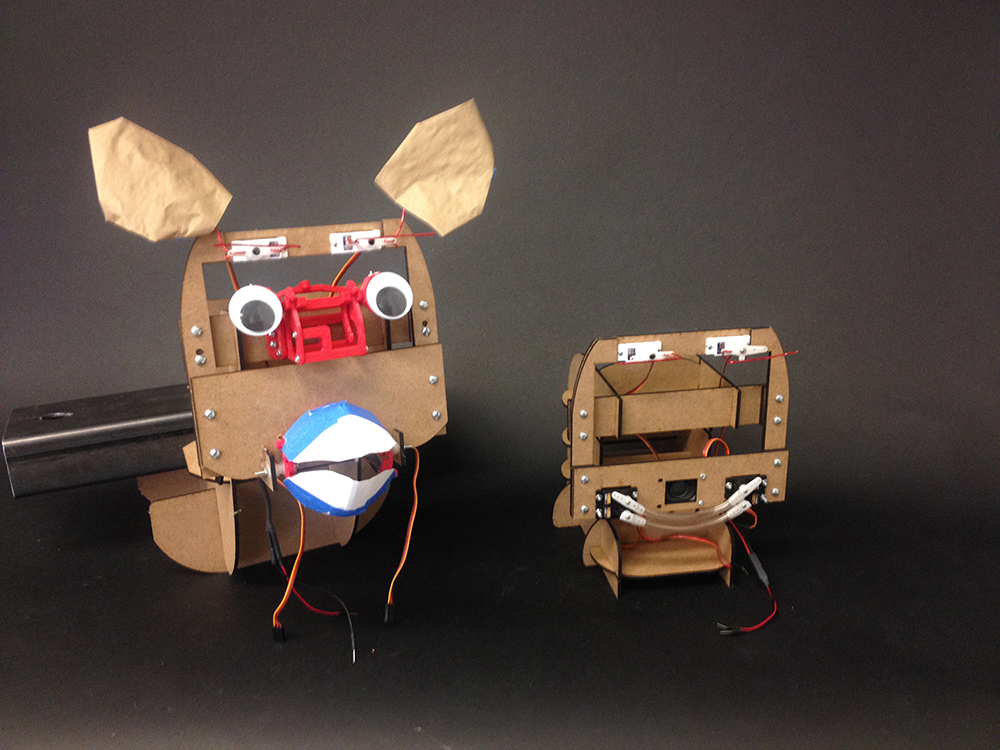
lots of prototypes
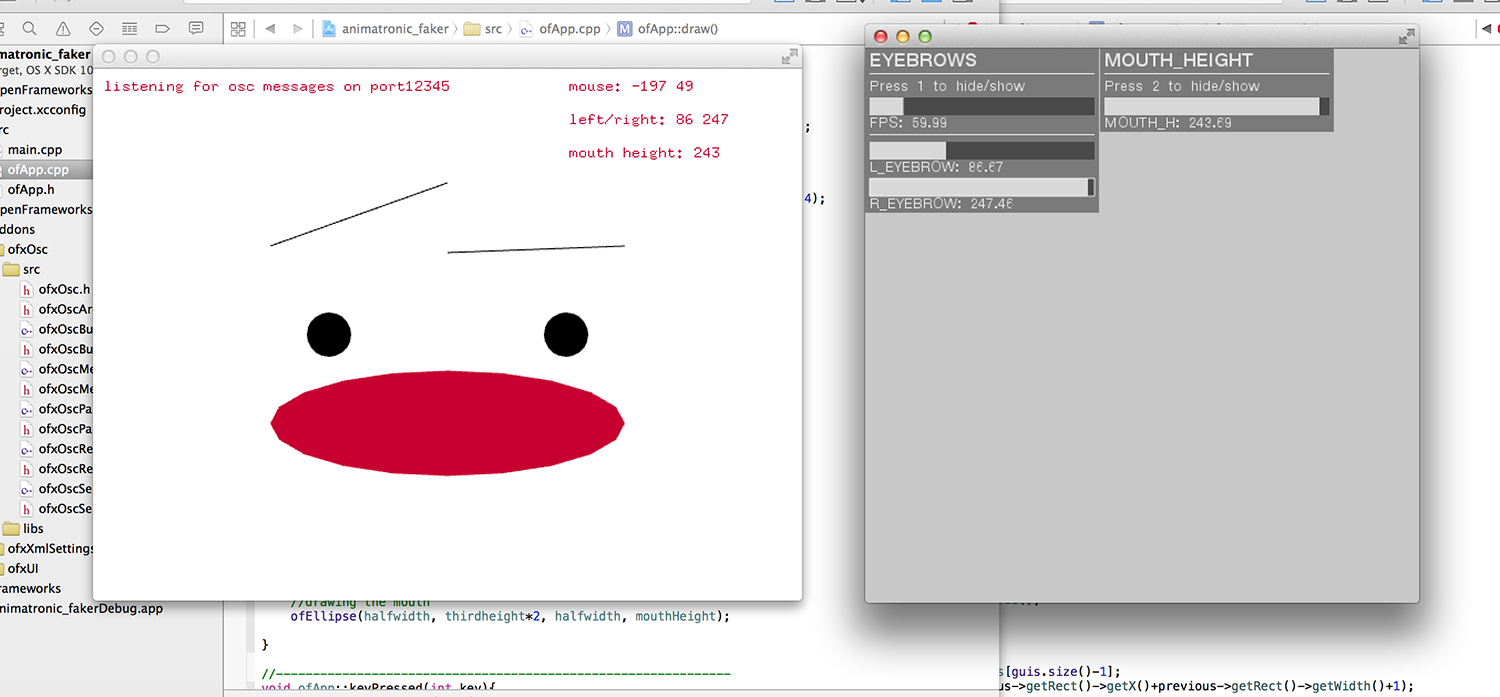
I began prototyping the software by building debugging OF applications that simulated the animatronic face and OSC output from FaceOSC.
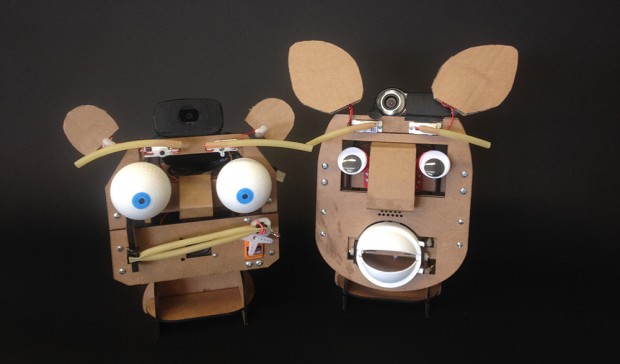
I eventually settled on this design for the hardware. (Greg left, Rob right).
Here’s the whole application pipeline working for the first time.
And again at the final show.
