Looking to 3d print and then investment cast.
Looking to 3d print and then investment cast.
Still got a lot of work to do.Turns out flocking is still hard.
Also, modeling.Repetitive modeling.More hours are needed.
I still think I have some hurdles. I’ve gotten a lot done, though.
Here’s what I have: clouds, basic flocking, some models for fish and the ship, and a couple miscellaneous other items and scripts. I’ve been focusing mostly on new modeling techniques, researching clouds and shaders, and animation.
Here’s what I still need to do: more complex flocking, finished models, a few spawning scripts, and more complex animations. Mostly bulk work I think; I need to put in the hours and it’ll get done.
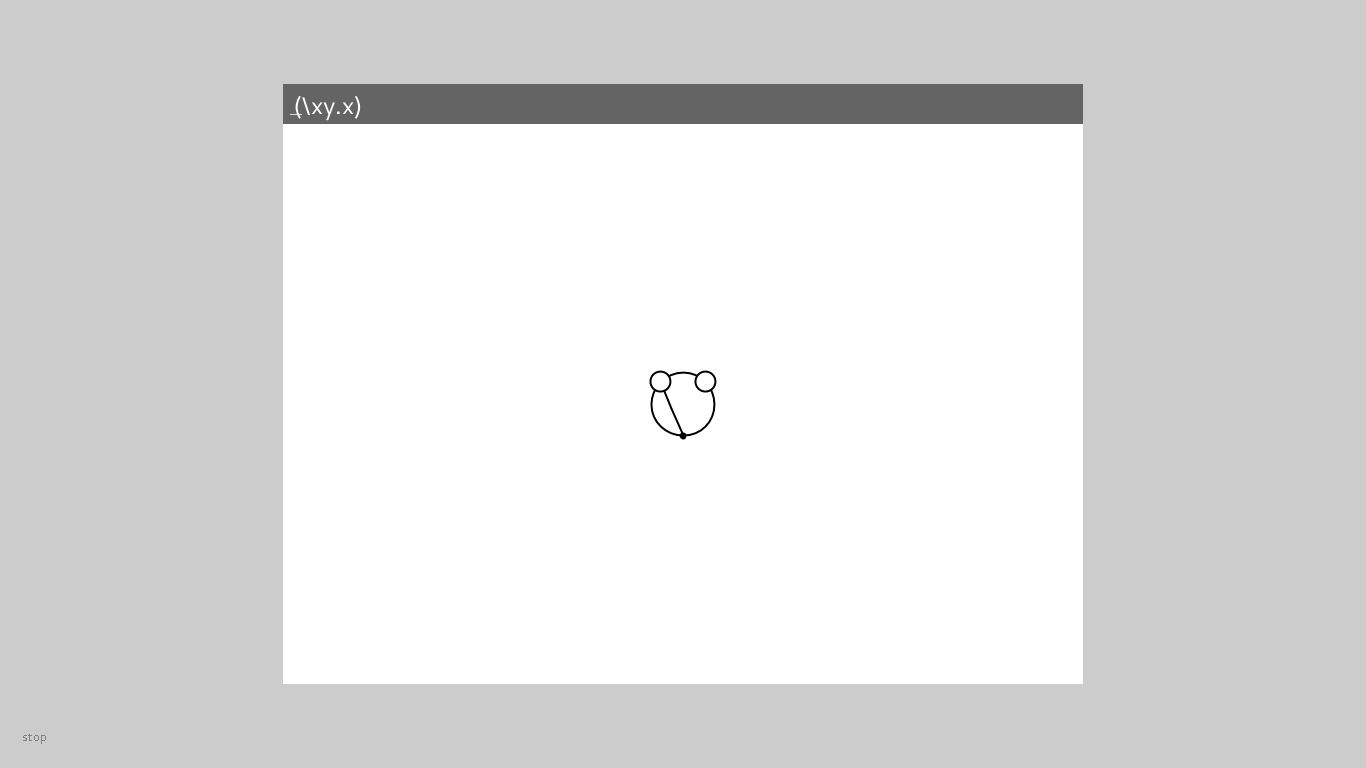 Most of the last week’s work on GraphLambda has been spent porting from the Processing environment to Eclipse and implementing various under-the-hood optimizations.Accordingly, the visible parts of the application look very similar to the last incarnation.The main exception here is the text-editing panel, which now provides an indication that it is active, supports cursor-based insertion editing, and turns red when an invalid string is entered.
Most of the last week’s work on GraphLambda has been spent porting from the Processing environment to Eclipse and implementing various under-the-hood optimizations.Accordingly, the visible parts of the application look very similar to the last incarnation.The main exception here is the text-editing panel, which now provides an indication that it is active, supports cursor-based insertion editing, and turns red when an invalid string is entered.
The biggest issue that still remains is distributing the various elements of the drawing so that the logical flow of the expression is clear.Once this is done, the drawing interface must be implemented, including a method of selection highlighting.
This is my skech for the final project.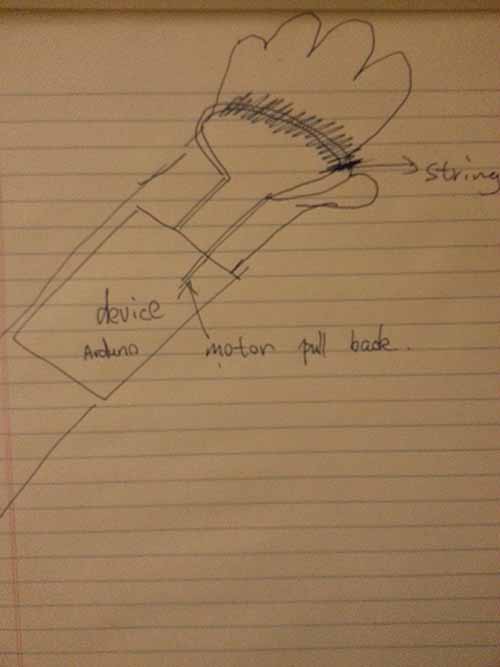 I’m making a physical prototype for the device on the hand.It looks like
I’m making a physical prototype for the device on the hand.It looks like
The next step I need to make a feedback prototype to give feedback for people and write code for the feedback system.
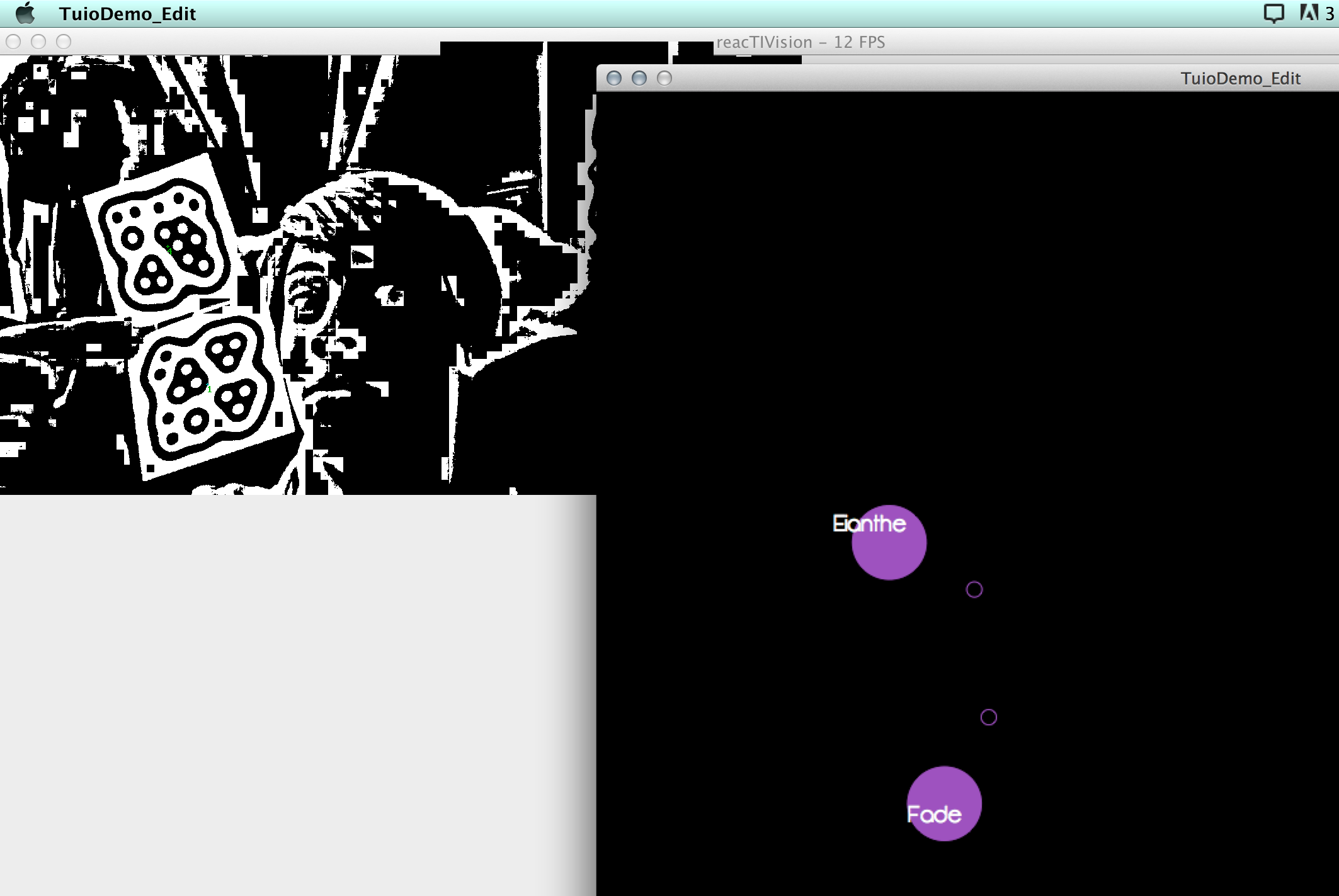
Since you last encountered me, I’ve been working on figuring out TUIO and Control P5, and have a few basic things working, but I still haven’t gotten two basic issues out of the way: 1) How do I make a construct that reliably holds the object IDs for the active fiducials, 2) How do I prevent more than 3 characters being selected at the same time?Both of these issues seem like they should be simple, and solved problems, but I can’t find anything useful on the internet.
In any case, check out some awesome screenshots from my recent tinkering!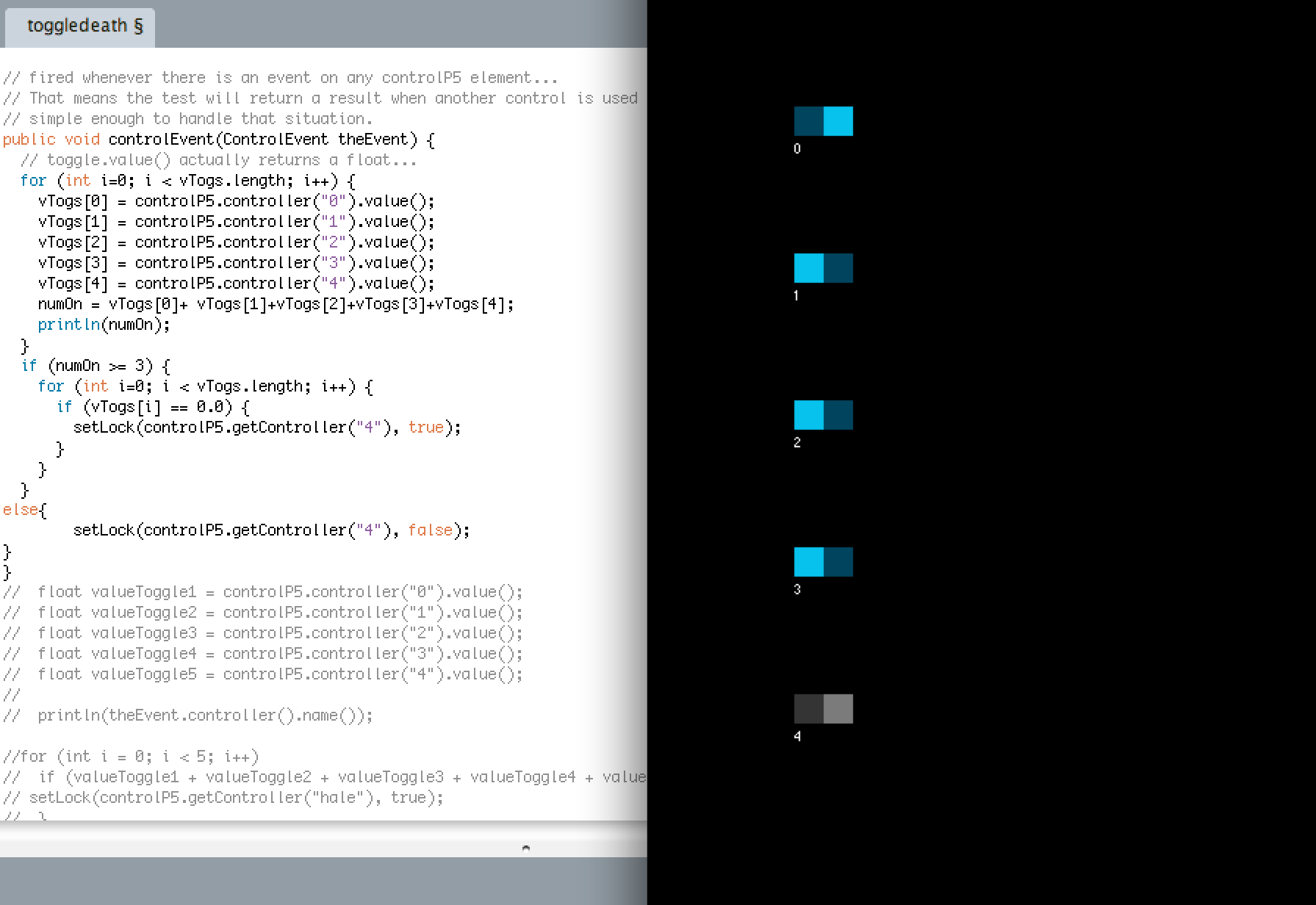
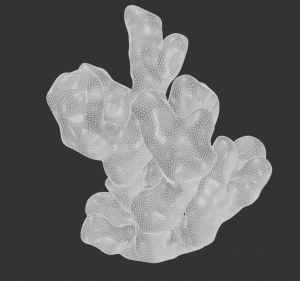
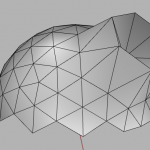
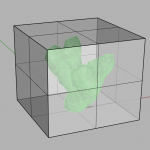
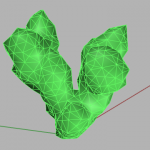
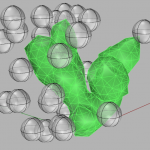
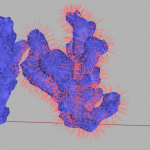
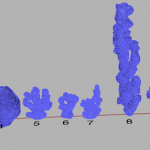
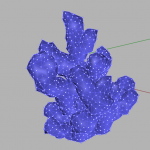
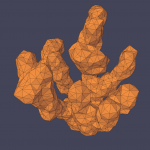
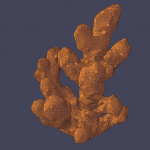
The goal is to ‘grow’ a mesh using DLA methods: a bunch of particles moving in a pseudo-random walk (biased to move down) fall towards a mesh. When a particle, which has an associated radius, intersects a vertex of the mesh that vertex moves outward in the normal direction by a small amount. Normal Direction means perpendicular to the surface (this is always an approximation for a mesh) Long edges get subdivided. Short edges get collapsed away. The results are rather spikey. It would be better if it was smoother. Or maybe it just needs to run longer.
Ideas for making smoother:
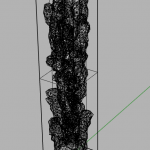
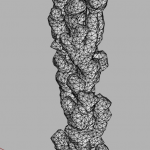
Ideas for making Faster:
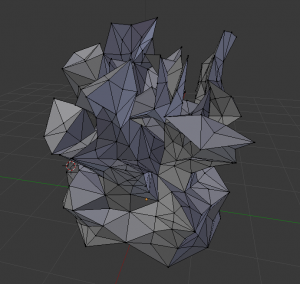
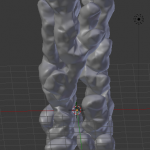
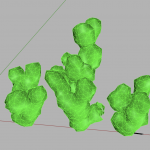
This one came out pretty branchy but its really jagged and the top branches get rather thin and platelike. This is why growing neighbor vertices (sharing nutrients) might be better.
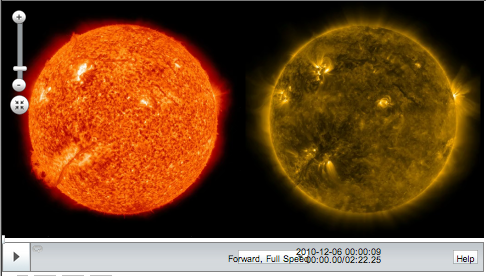
I’ve switched focus a bit since the group discussion on project ideas. I’m still focusing on the SDO imagery and displaying multiple layers of the sun time lapse, but I’ve decided that a more interesting approach to the project is to explore how people process different images of the sun when viewed through different eyes. The first technical challenge to this is to create a way to view multiple Time Machine time lapses side by side. I’ve managed to learn the Time Machine API and I’ve reworked a few things as follows:
A) Two time lapses display side-by-side at a proper size to be viewed through a stereoscope
B) Single control bar stretched beneath two time lapse windows
C) Videos synchronize on play and pause. (Synchronization on time change or position change still results in jittery performance)
The synchronization needs a bit of work still, and then comes the time to work on the interface a bit more to support changing the layers in an intelligent and intuitive way. I need to figure that out a bit and make some sketches.
Now there are many Kinect or Computer Vision systems.However, these two systems have a very virtual experience.I think I’m going to give some real feeling experience to the user who uses these systems.Also there are some feedback thing for Kinect/CV system.such as haptic phantom here is a video:
But I think it is a little limited for users.They must hold a pen to feel virtual things in the virtual world.So I am thinking to make a more natural feed back for them.The basic idea is to make a wearable device on the back of the hand and when push to something.It will give you some feedback.But it may not be stop your movement.It may just tell you: hey there’s something in the front of you.I’m thinking to use motor to be the engine for feedback part and kinect to detect people’s movement.Just a simple haptic thing for kinect and later maybe more complicated exoskeleton thing which Golan told me.
See Kyna’s post.